您好,临朐县德海机械设备厂网站欢迎您!
您好,临朐县德海机械设备厂网站欢迎您!
18663621388

2020-01-14
电子皮带称中控制模型的偏差,是人工操作经验和控制模式的归纳和总结,主要来源于对现场有经验的操作人员和技术人员对配料量偏差修正的操作经验,考虑到工业控制情况下对实时性要求较高,所以总结的控制规则力求少而精.以便减小搜索空间,简化推理机的设计,增加系统的响应速度。
自动综合控制模型的控制规则可在实际运行中不断修正,不断补充,逐步完善。
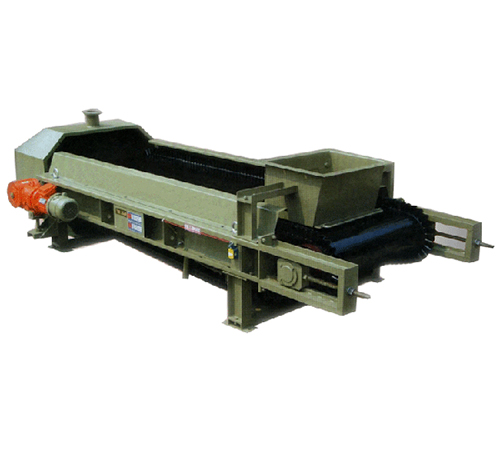
控制系统的结构系统硬件由两大部分组成,一是现场皮带秤检测系统和给料机控制系统,其次是工业控制计算机系统及其接口,各控制器(1,2,…,n号)安装在现场皮带秤和给料机附近,接收电子皮带称的料流量信号,和工业控制计算机发送来的给料量设定值,控制给料机的下料量1计算机控制系统进行配料比例的计算,向各控制器发出给料量设定值和加时跟踪信号,实现配料系统的启停控制和连续配料控制。
同时跟踪计算等各配料量的动态偏差,根据动态偏差值和累积偏差值,由自动偏差控制模型给出设定值的修正量1现场实验表明,上述自动综合控制模型能够动态地实现配料比例的无偏差控制,保障系统的稳定和牢靠运行。
针对电子皮带称配料系统常规控制模型存在的问题,开发的皮带秤配料系统综合自动控制模型是计算机技术、人工自动技术和常规控制技术相结合的产物,良好地解决了配料系统中各控制环节大滞后给系统稳定性带来的影响,解决了动态偏差的自动修正,现场实验达到了预期的效果,该控制模型可在类似的配料子系统中推广使用。

上一条: 计量螺旋秤在水泥计量系统优化中的方案
下一条: 计量螺旋秤与减量秤计量特性的分析